Implicating a navigational AI demands a large amount of training data. Generating enough data for computer to learn could be difficult. That would require for a simulator for the computer to generate data for it to study itself. Running a simulation can also help the team to know what kind of issue that will encounter in a real game and make adjustment ahead of the game. This simulation will teach you how to run a simulation. The simulation software we are using is gazebo, it is a software that is native to the ROS environment, and it is very easy to install. Follow this link to learn more on gazebo.
Creating a simulation using Gazebo is easy. The model that created by Solid work can easily be imported into Gazebo simulated environment. This only requires the transfer of Solid work file to a format called URDF. Learning URDF stands for Universal Robotics Description, the file describes the shape of the robot and how the links and joints of the robot joint together. Building a URDF file from scratch can be difficult, to learn how to do that, you can follow this link.
The way that we are going to teach you to generate a URDF model efficiently is to convert a Solidwork model into a URDF file. With this conversion, you can import your robot design into the gazebo simulation easily. First, we will convert the course of 2020 MRDC game as an example and as the environment for our robot to run on in the second part of this tutorial.
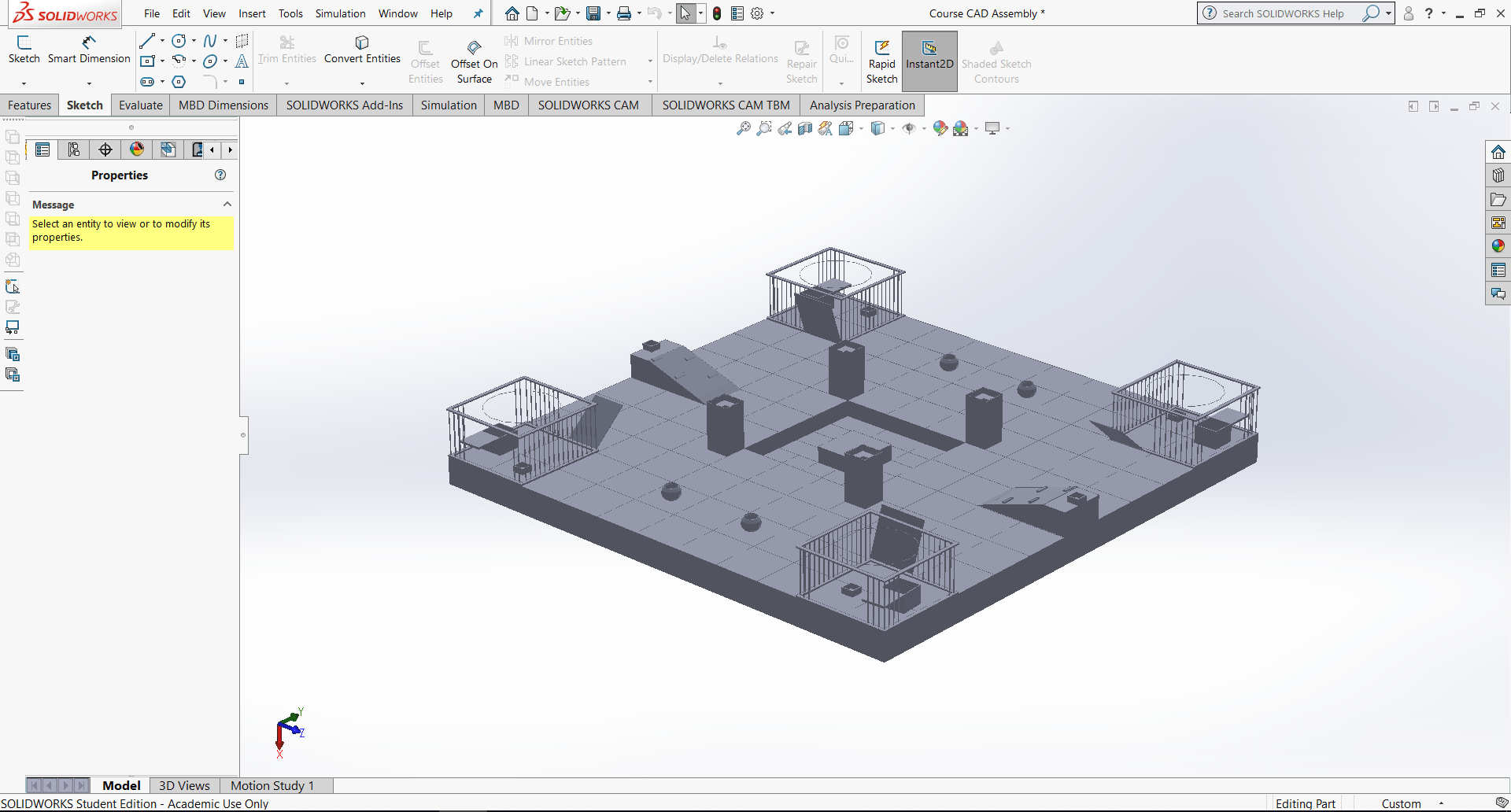
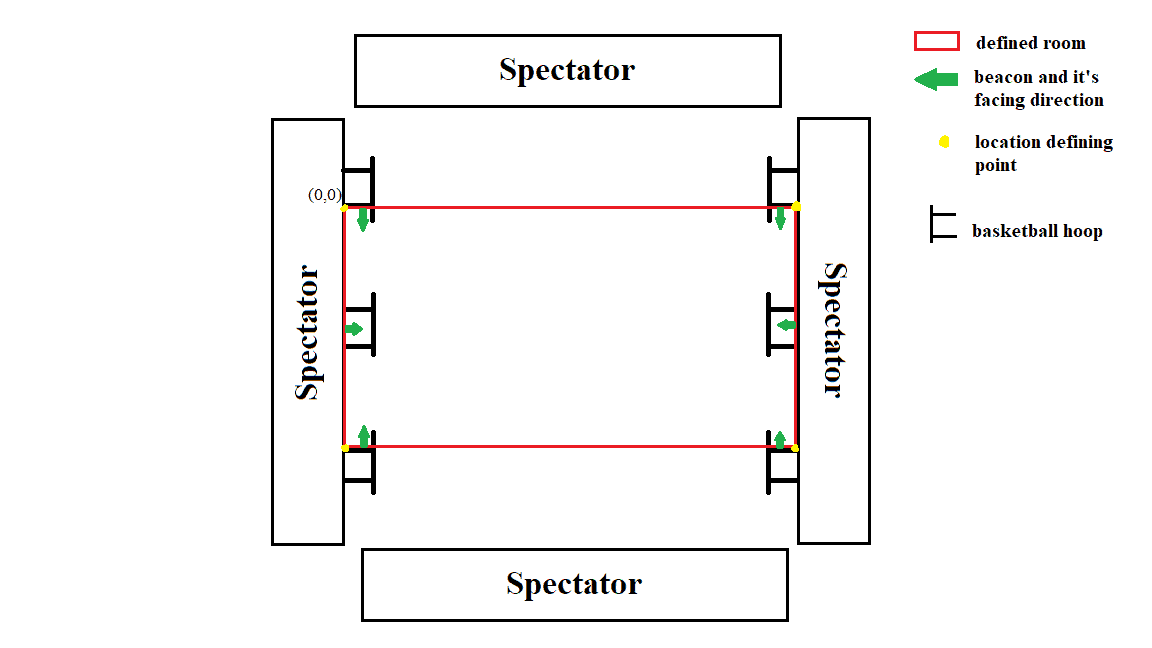
First, I convert the course CAD of the 2020 MRDC course into a Solidwok file to work on it in Solidwork. This is how it looks like.
Conversion to the URDF requires a Solidwork plugin witch can be installed from this link. Make sure you have a Solidwork installed in your computer before you process to install the plugin.
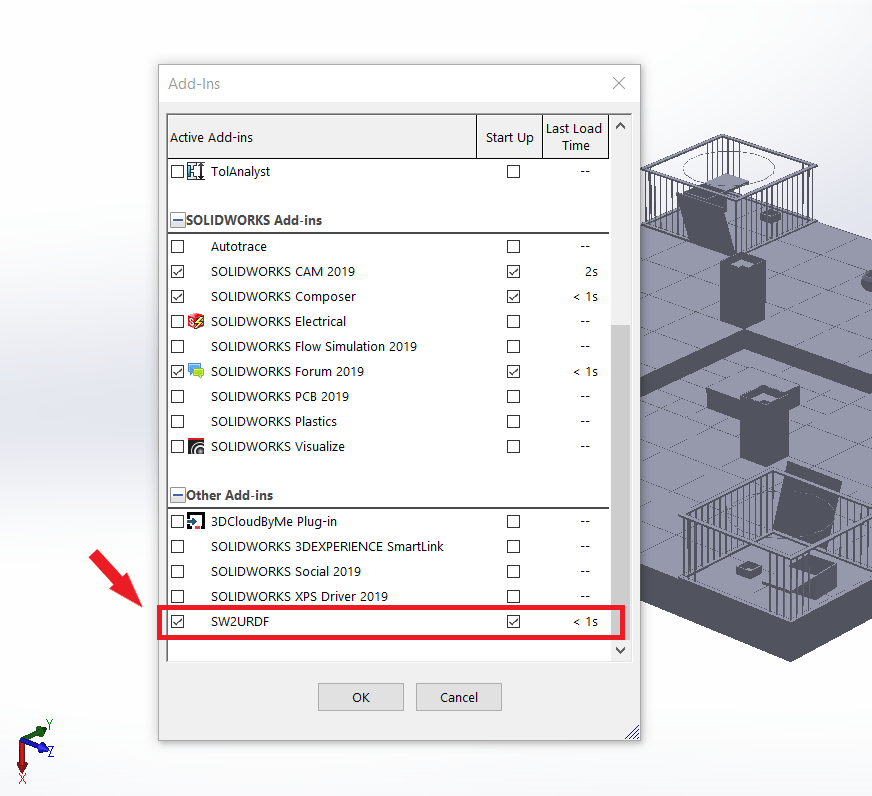
After the installation, go to setting and click on add in.

In the add in window, select sw2urdf exit.
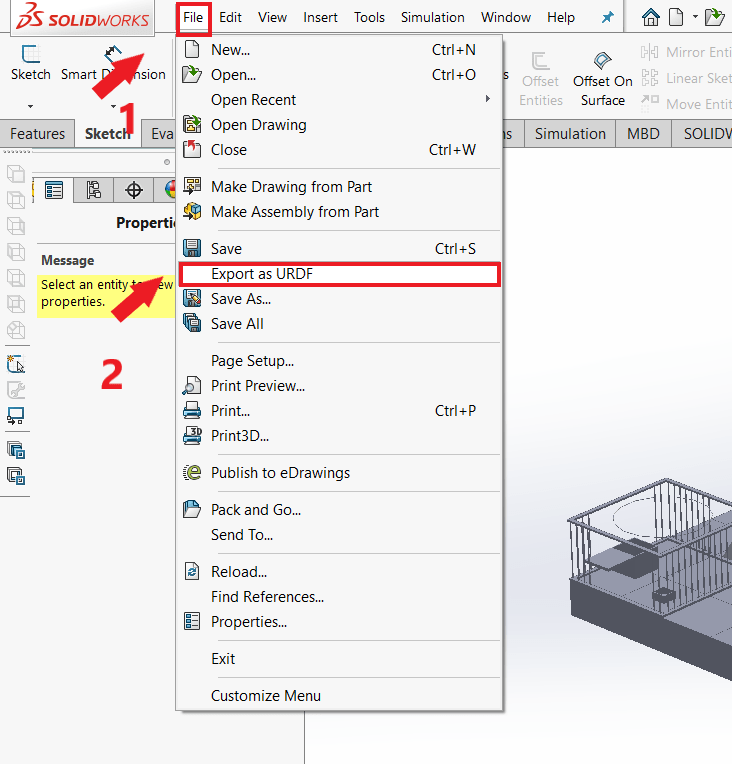
From the tool bar, click on file and select “export as URDF”
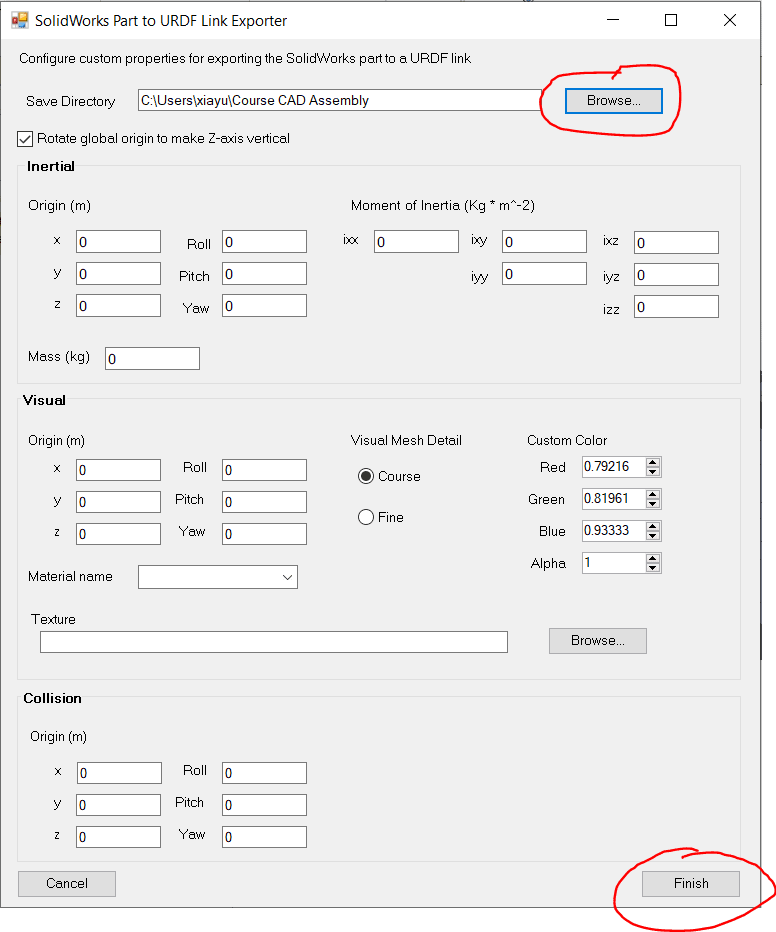
Make sure you put in the proper directory and click finish.
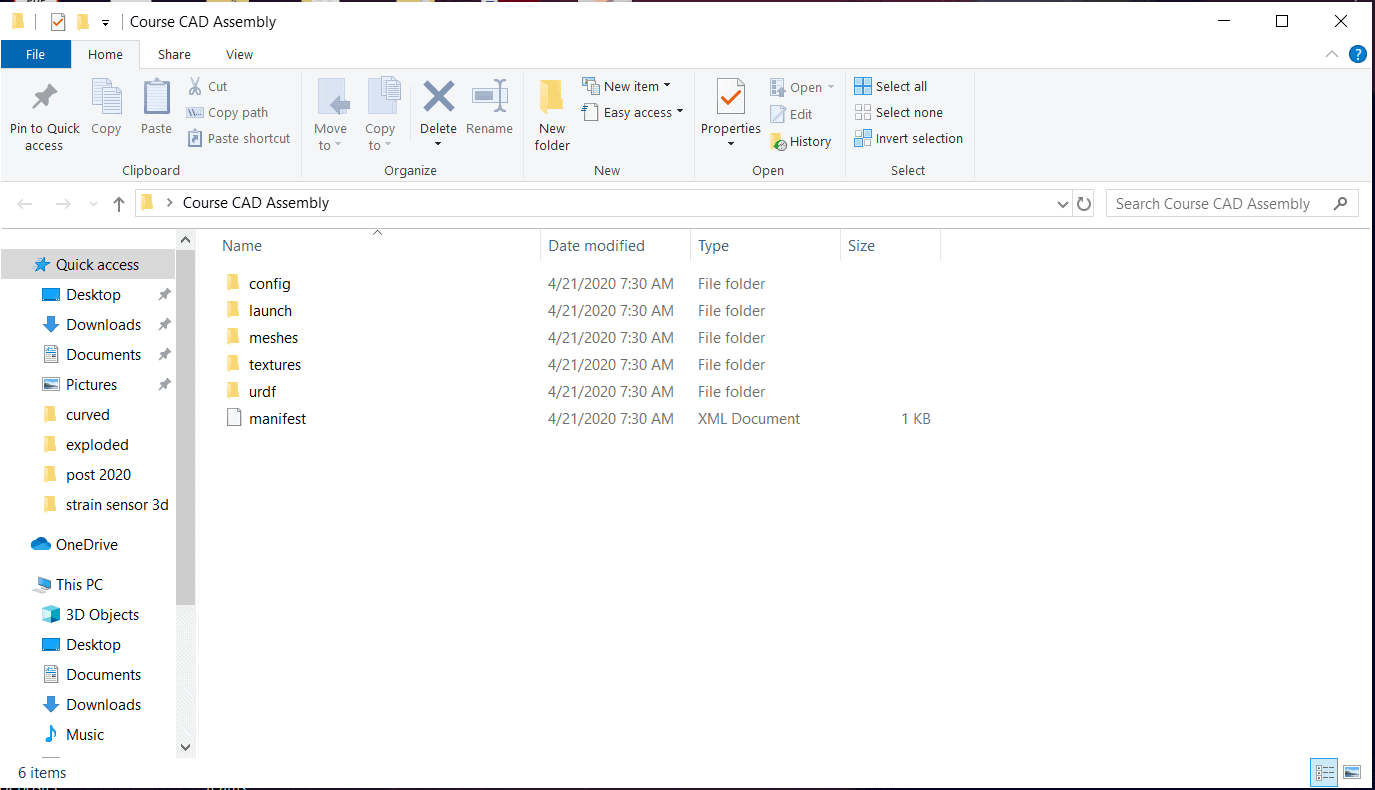
The URDF file directory will looks like the following.
In the next part, I will show you how to define link and joints in the URDF file.



{kind=link}
{kind=link}
{kind=link}