The simulation software gazebo is based on the robotics operating system (ROS), read more about ROS the system by clicking this link . The set up of ROS is a required prerequisite for running the simulation. Gazebo is a ROS packaged that is part of the ROS installation. Please follow the tutorial on the ROS website from this link. Please continue this tutorial after the installation of ROS is completed.
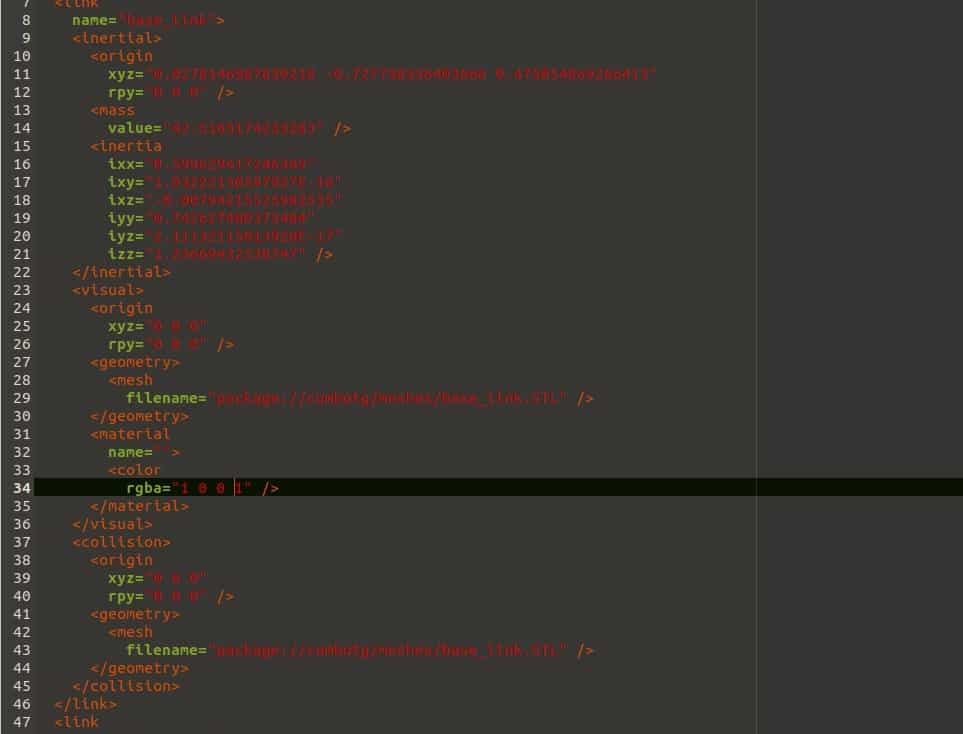
First, let’s take a look at the URDF file we generated from the last part of the tutorial. In the file you will see the geometry of the file is saved at the mesh file.

In the launch File folder are the launch file for Rviz and Gazebo. Rviz is a visualization tool and Gazebo is the actual simulation tool that we are using. The launch file has name display.launch and gazebo.launch respectively.
Frist, you need to move the entire launch file into your workspace. To learn how to create this workspace, please read this link (http://wiki.ros.org/catkin/Tutorials/create_a_workspace). Move the file under directory src. Launch the program by type in following in a terminal.

Now you can see the simulation opened in gazebo.

To change the color of the parts of robot, go to the .urdf file in the urdf folder and change the color in the following section.
Now, you can create a simulation. In the next tutorial, I will show how to run a simulation. You can find the previous part from the following links.
Second Part
Creating a Simulation of Arena with Gazebo (Part Two of Three)
First Part
Creating a Simulation of Arena using Gazebo (Part One of Three)




{kind=link}
{kind=link}
{kind=link}