This is the second part to the overview post.
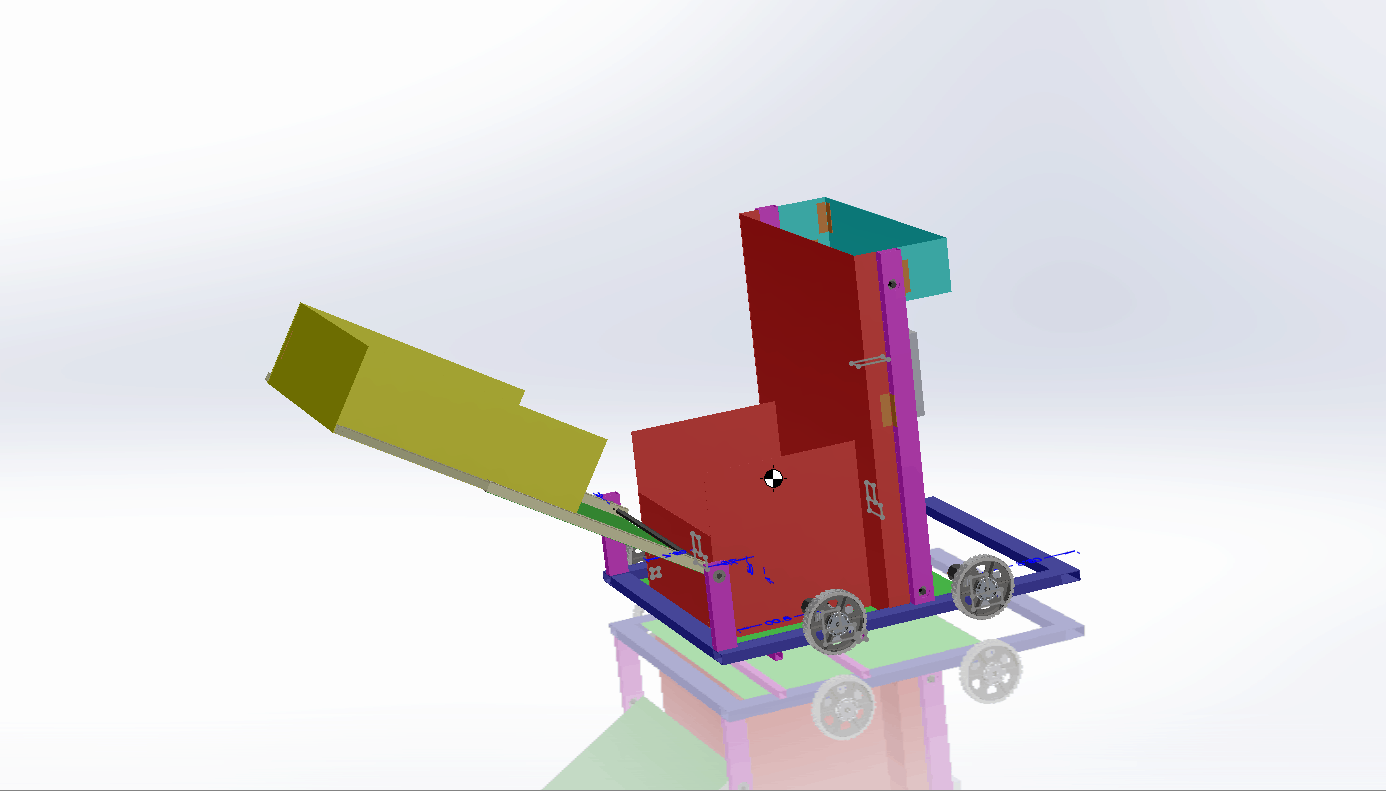
Intake Mechanism
The intake mechanism (colored yellow) is attached to two tubes with one being inside of the other. When the box is lowered, it will automatically telescope out with the help of gravity and reach into the pit to collect the pit balls and then when the box is brought back up, the box will retract and the balls will roll into the red storage bin while hopefully not falling out due to the high walls.
Storage
There is nothing particularly special going on here, it is just a big box to store the balls. However, there is a little slot big enough at the back of it that allows a small number of balls to make contact with the elevator mechanism.
Elevator Mechanism
The elevator mechanism here is a motor driving a pulley wheel attached with a belt that makes contact with the pit balls and due to contact with the back of the storage and the belt, gets pulled up to the top of the turqoise box and drops them through a funnel which leads to the sorting mechanism.
Sorting Mechanism
The sorting mechanism is a rotating separator with a color sensor attached to it that senses the color of the ball and rotates the separator into one of two tubes for ejection. If the color of the ball is beneficial to the objective at hand such as the potion aspect of the course, then the ball will be ejected using that tube. On the other hand, if the color is not beneficial such as being worth negative points, the ball will be ejected out the other tube.
Those are the current plans on developing this robot.



{kind=link}
{kind=link}