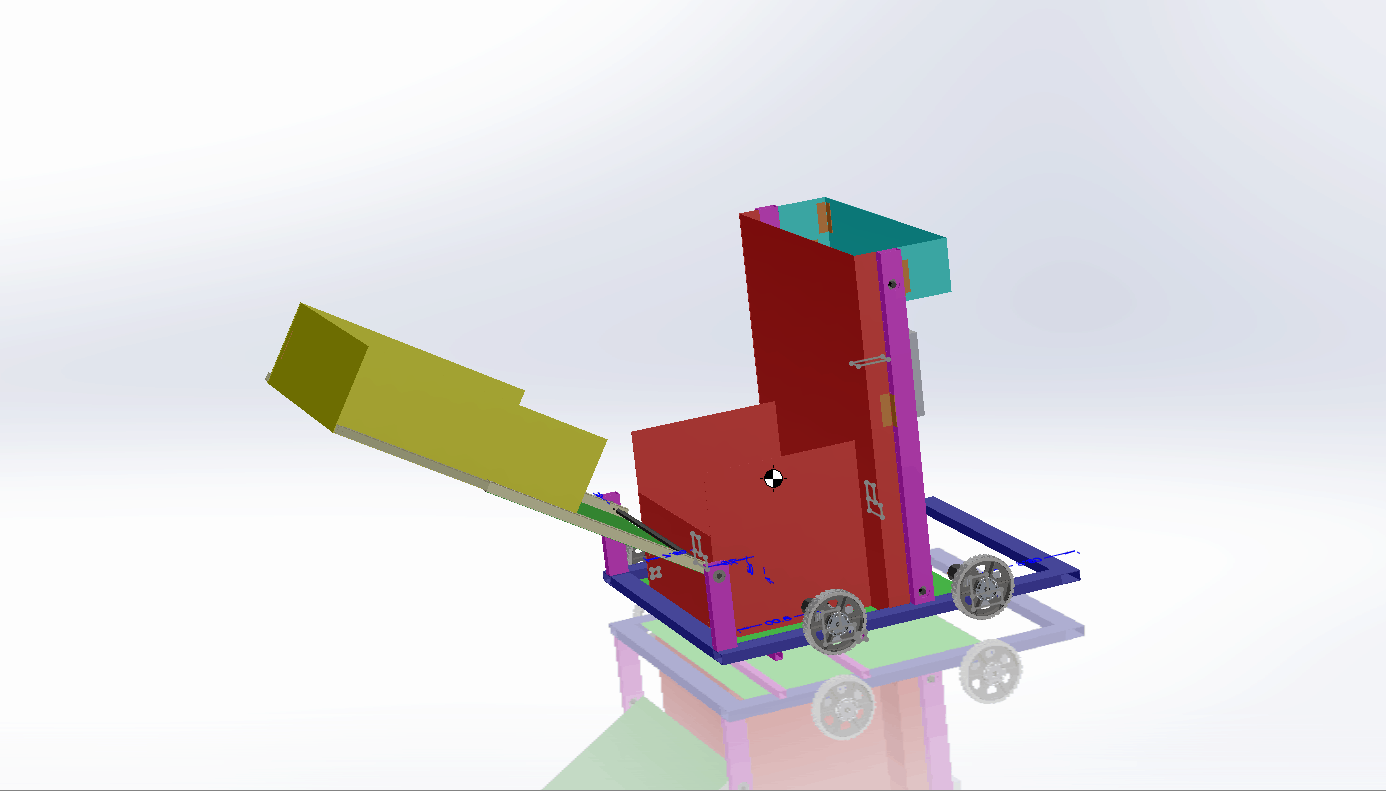
 Since we couldn’t actually build the robot, I just wanted to give a quick rundown of what the robot was supposed to do. So at the front, the “yellow” box actuates and slides in and out to scoop up plastic balls from the ball pit. Then the balls get dumped into the “red” box. Behind this box is a ball elevator that bring the balls up the robot so that it can sorted under the turquoise box which would help us place the balls with the highest amount of points to maximize our point totals. That was a quick overview of what we plan on building come fall/spring next year assuming the challenge doesn’t change too much.
Since we couldn’t actually build the robot, I just wanted to give a quick rundown of what the robot was supposed to do. So at the front, the “yellow” box actuates and slides in and out to scoop up plastic balls from the ball pit. Then the balls get dumped into the “red” box. Behind this box is a ball elevator that bring the balls up the robot so that it can sorted under the turquoise box which would help us place the balls with the highest amount of points to maximize our point totals. That was a quick overview of what we plan on building come fall/spring next year assuming the challenge doesn’t change too much.
You may also like

Submitted our Engineering Design Council Proposal today requesting workspace at the ESPL!! Stay tuned!

The Freshman Combotics team went with an egg-beater design for their weapon this year! The weapon will be running on a dead […]

Parts & Wreck – First Robot Progress Update We are this year’s Freshman Combotics team and we got a great start into […]

{kind=link}
{kind=link}
{kind=link}
Accident prone is focusing on designing a horizontal spinner this year. We picked out all of our electronics such as the drive […]