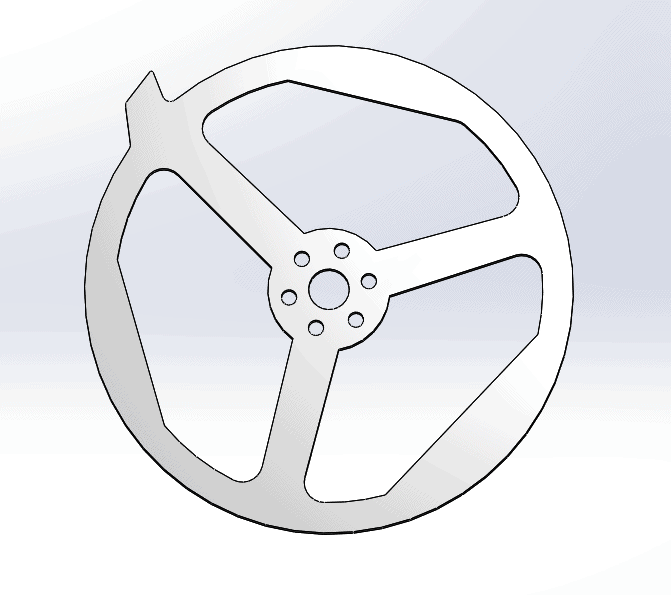
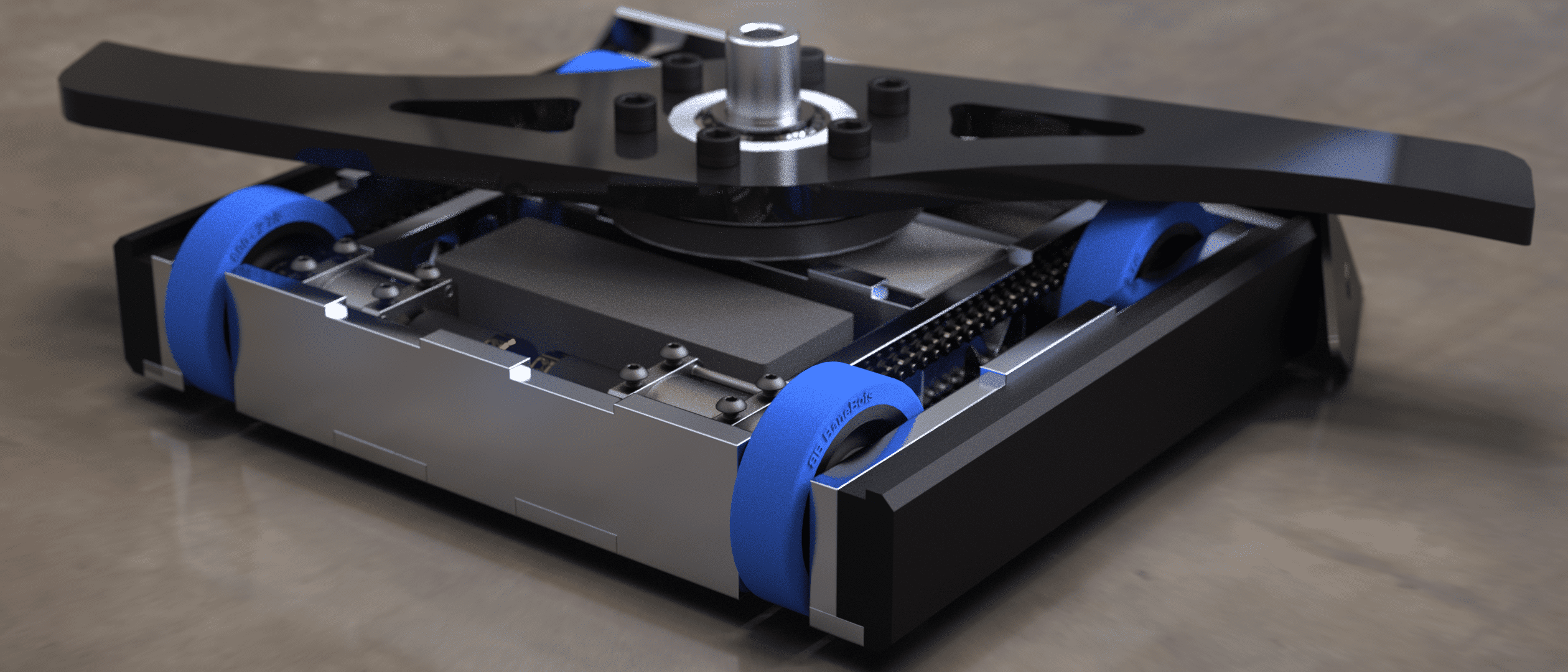
&emps;Real world experience has made quite a bit of progress this semester, despite the restrictions that come with COVID. We decided on a vertical spinner this year, as it is relatively simple and with the loss of in-person meetings and reduced ability to prototype, we felt that something simple was the best option for us. We are using a bit of a different weapon profile than previous people, but we will have to see if it is feasible with our design. It would allow us to have an extremely high MOI compared to our previous profile. We are also making some changes to electrical systems compared to last year.
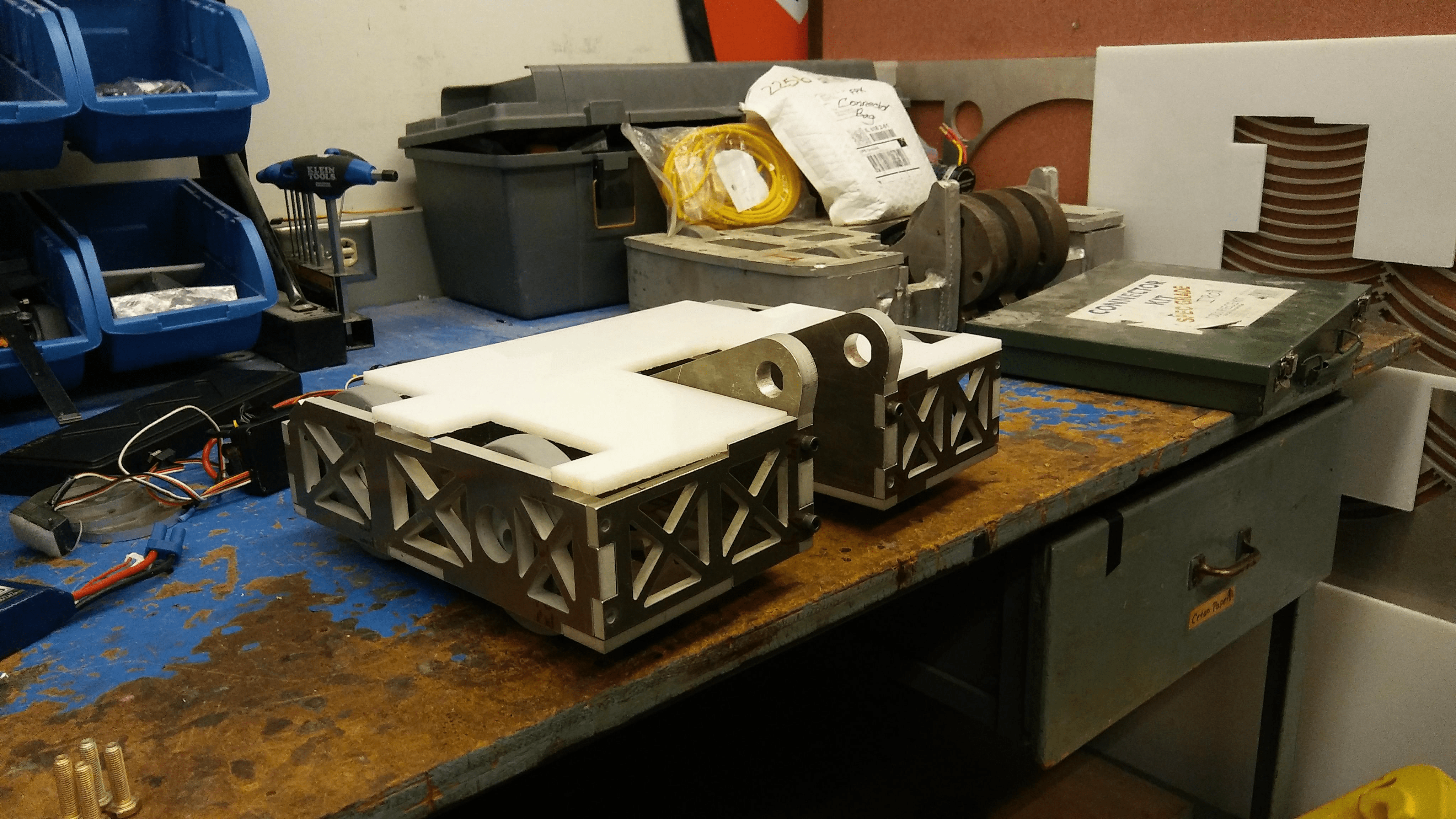
&emps;We are using the O-Drive motor controller rather than standard ESCs, and using direct drive instead of gearboxes. This allows us to eliminate points of inefficiency, and have less weight due to not having heavy gearboxes and reductions. The O-drive also has useful features that allow us to have more fine control over our robot as well greater torque due to our low KV motors. One downside to the o-drive is that it requires us to fit encoders into the robot, but we don’t foresee that being a big issue. We are using the same ESC and motor as last year for our weapon.
&emps;Chassis design is also underway, and we are working with the sheet metal tool in Solidworks in order to have some armor plates on our robot this year. The chassis team is also working around some of the restrictions of having a vertical spinner, namely reduced invertibility. They have a few solutions to make us harder to flip, but our robot will not be invertible. We would like to finish the CAD for our robot over break, and ideally begin to fabricate next semester, however that is up in the air due to COVID. We also are not sure about the status of the competition but we are hopeful and will continue to build as if it is still going to happen.
Pictures:




{kind=link}
{kind=link}
{kind=link}
{kind=link}