
First semester so far has been a very exciting time for the projects team named S.P.O.T, which stands for Shooting Projectiles On Target. Our goal is to develop an autonomous robot that is capable of detecting pre-determined targets with a camera then shooting 32mm rubber balls at said target. Of course we do not want the balls to be shooting at too high of a speed because we will be presenting this at EOH, so we will make sure that no bystanders are capable of being injured.
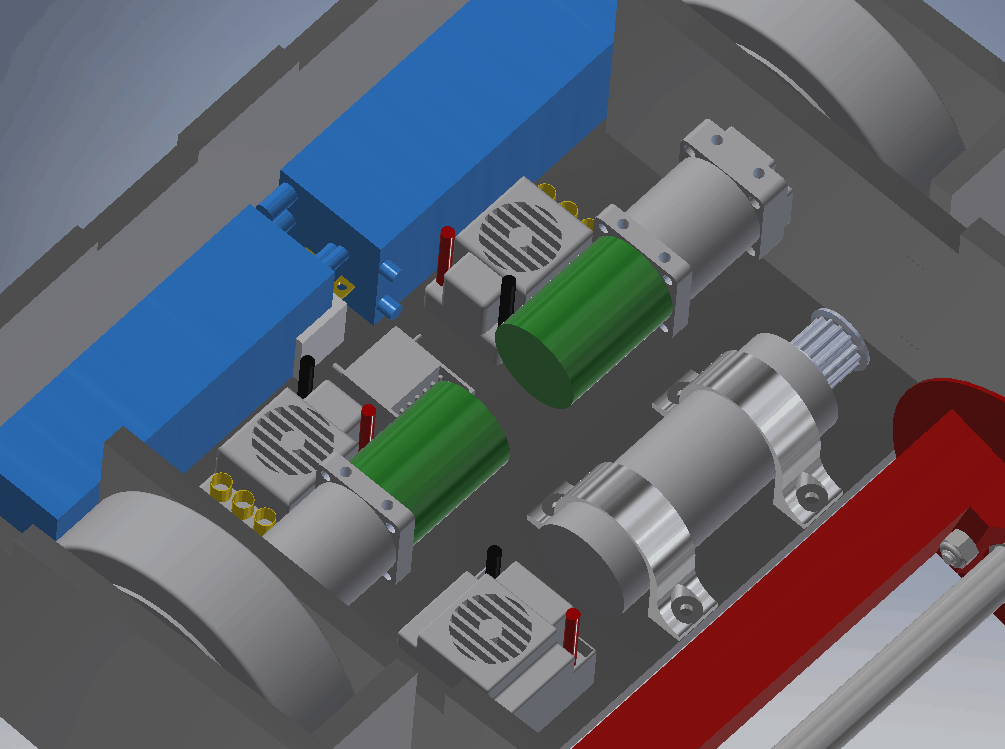
We started the beginning of the semester by determining what our goals are and how we can design around those goals. Our main goal was for the robot to be capable of shooting and identifying a target from 20 feet away on its own. We then began to brainstorm ideas for a launching mechanism. We had a couple of ideas to begin with such as a trebuchet or using a pressurized gas system similar to a paintball gun. However, we deemed the first idea to be too inaccurate and slow to be used. With the gas system we thought it’d be too much of a safety hazard to use around EOH so we wrote off both of the ideas above. Eventually after some research, we decided to go for a flywheel ball launching system, similar to flywheel mechanisms in other competitions like FRC or VEX. After deciding to go with flywheel, we began to CAD out some potential designs and we hope to prototype them in the upcoming Spring Semester.
Our other focus this semester was deciding how we wanted our robot to move around. Because how else is a robot supposed to be autonomous if it can’t move, right? We were thinking of potentially using mecanum wheels but instead decided not too due to their low traction. We’ve decided to go with normal HiGrip wheels as an alternative. We will be driving our robot with two motors in the front each one powering one wheel. The robot will drive tank style so that it can turn in place which provides for increased maneuverability.
Overall the S.P.O.T team is pretty happy with the work they have done this semester and can’t wait to get back in the Spring Semester to prototype and finally build our robot.



{kind=link}
{kind=link}