We are iROBO, an iRobotics VEX U team. This year’s game, named Spin Up, allows a robot to score points in three different ways. The first method to scoring points is moving a foam disk into a raised goal. The second method involves rotating a roller of two colours to a specific colour. The final method of scoring changes the properties of a field element, this element being the floor tiles. During the last 10 seconds of a match, for every tile a robot is touch, points are added to that team’s total score.
iROBO’s objective this past semester was to create two robots that can score using the three methods above. One robot must be no larger than 18” x 18” x 18” at the start of every match it competes in. The other robot must be no larger than 15” x 15” x 15” at the start of every match it competes in. We have decided to make the 18” x 18” x 18” robot’s main foam disk launcher a flywheel while making the 15” x 15” x 15” robot’s main foam disk launcher a catapult. The reasoning behind making the larger robot’s foam disk launcher a flywheel and the smaller robot’s foam disk launcher a catapult is due to the size constraints of the chassis.
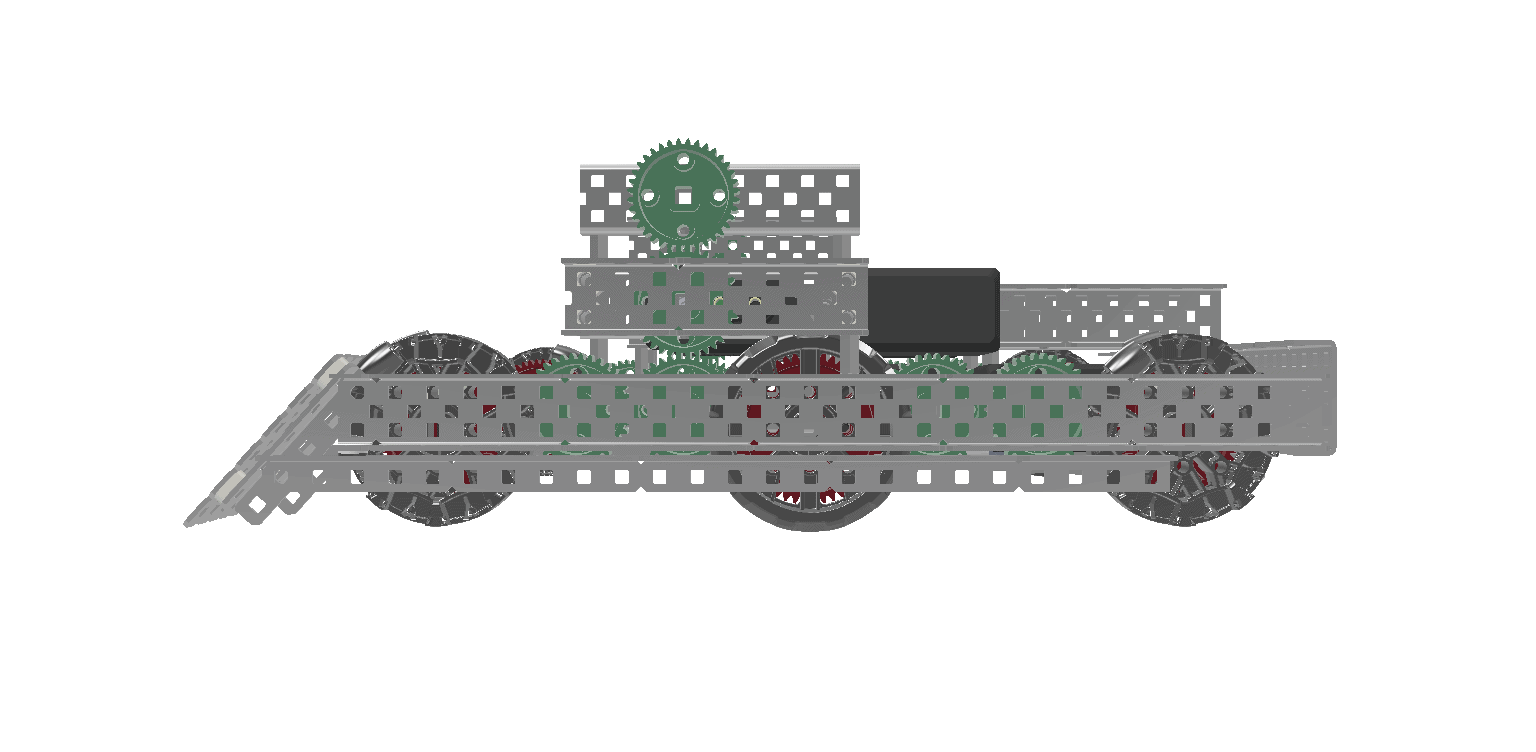
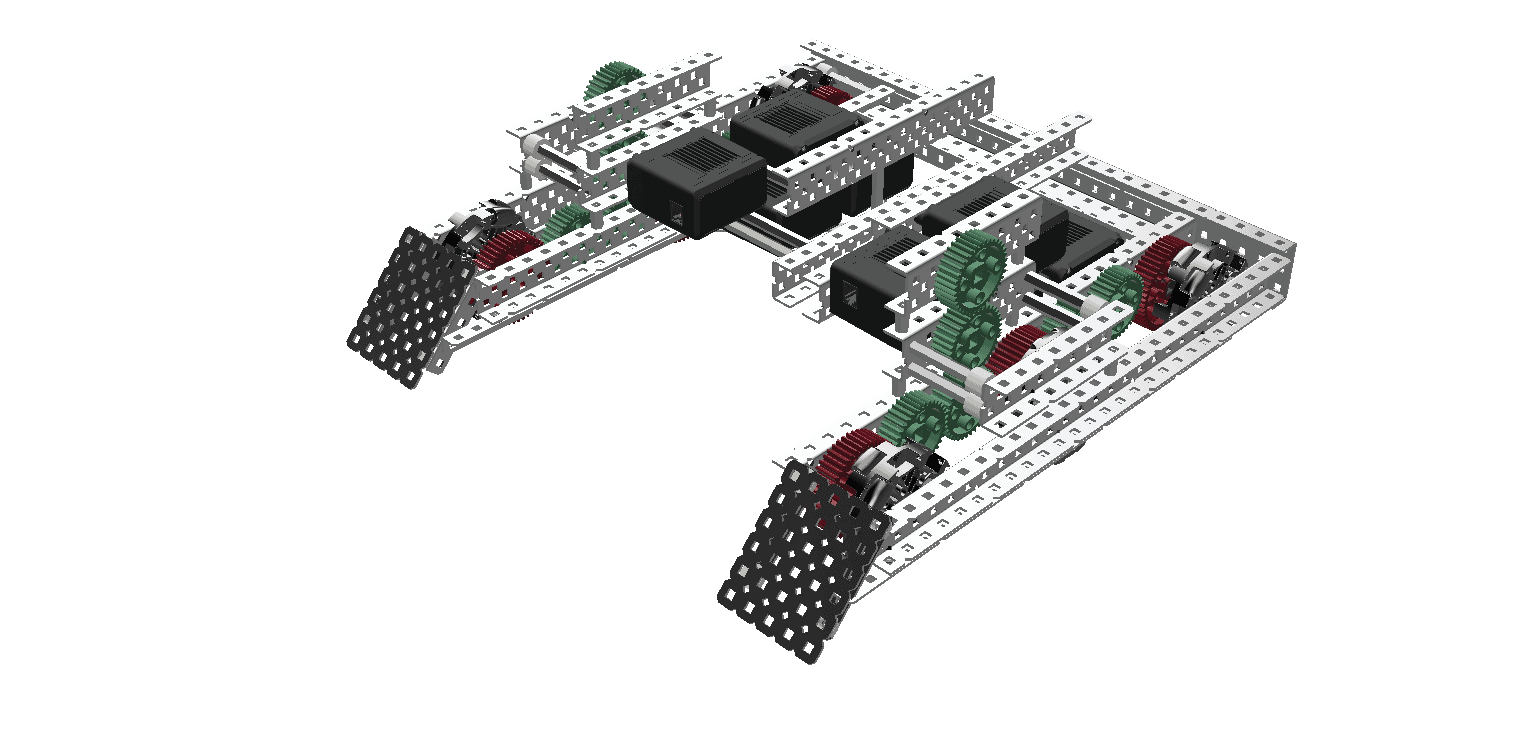
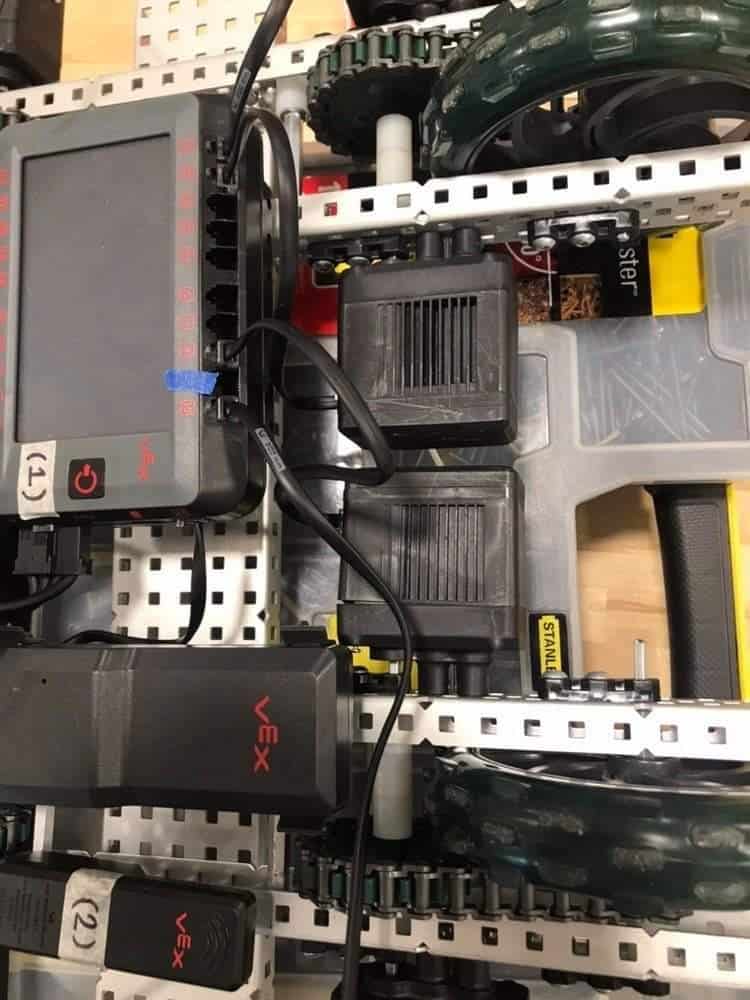
Our 15” x 15” x 15” robot chassis, shown in all figures, demonstrates the compact nature of the size constraint imposed on the robot. Two aspects we determined a chassis can excel in are speed and strength. Due to the fast pace nature of Spin Up, we have decided to excel in speed. This means we need to create a chassis that can move in any direction on a plane, spin around its central axis and stop as fast as possible. When we were thinking about how to increase the speed of these three aspects we realized that lowering the moment of inertia of the entire robot as much as possible would allow us to create a chassis that would achieve our desired needs
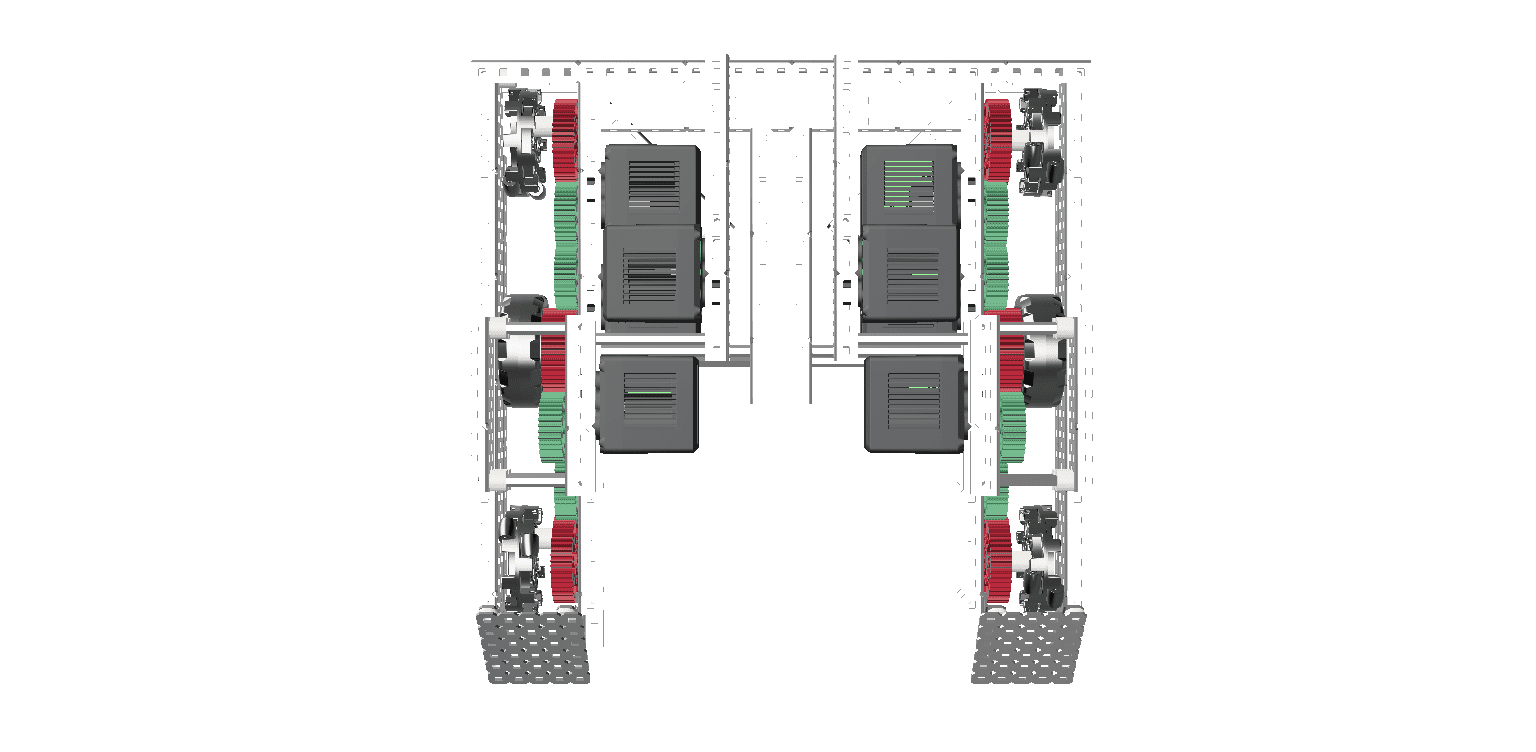
iROBO has designed a six-motor drive chassis where not all the motors are on the same plane. The offsetting of two of the motors allows room for the two catapult motors to be placed as close to the center and as low to the ground as possible. The other six drive motors are also placed as close to the center and as low to the ground as possible, putting as much of the weight as possible away from the edges, lowering the overall moment of inertia. This specific placement of the motors also allows us to quickly change any motor cartridges that overheat due to continuously being loaded.
We notice when reviewing past competitions that the amount of time a driver would spend lining up the robot to be in the right location to launch the foam disks took up a significant amount of match time. We wanted to lower this “lineup time” by making it as easy as possible to drive and launch the disk. One of the field elements is a low goal, which is a 90-degree wedge where the wedge faces the inside of the goal zone. We realize that we could use the corner of the low goal to automatically line up the robot. We have designed a wall that when driving directly into the low goal from the center of the field aligns the robot with the high goal, removing the alignment time other robots might have.
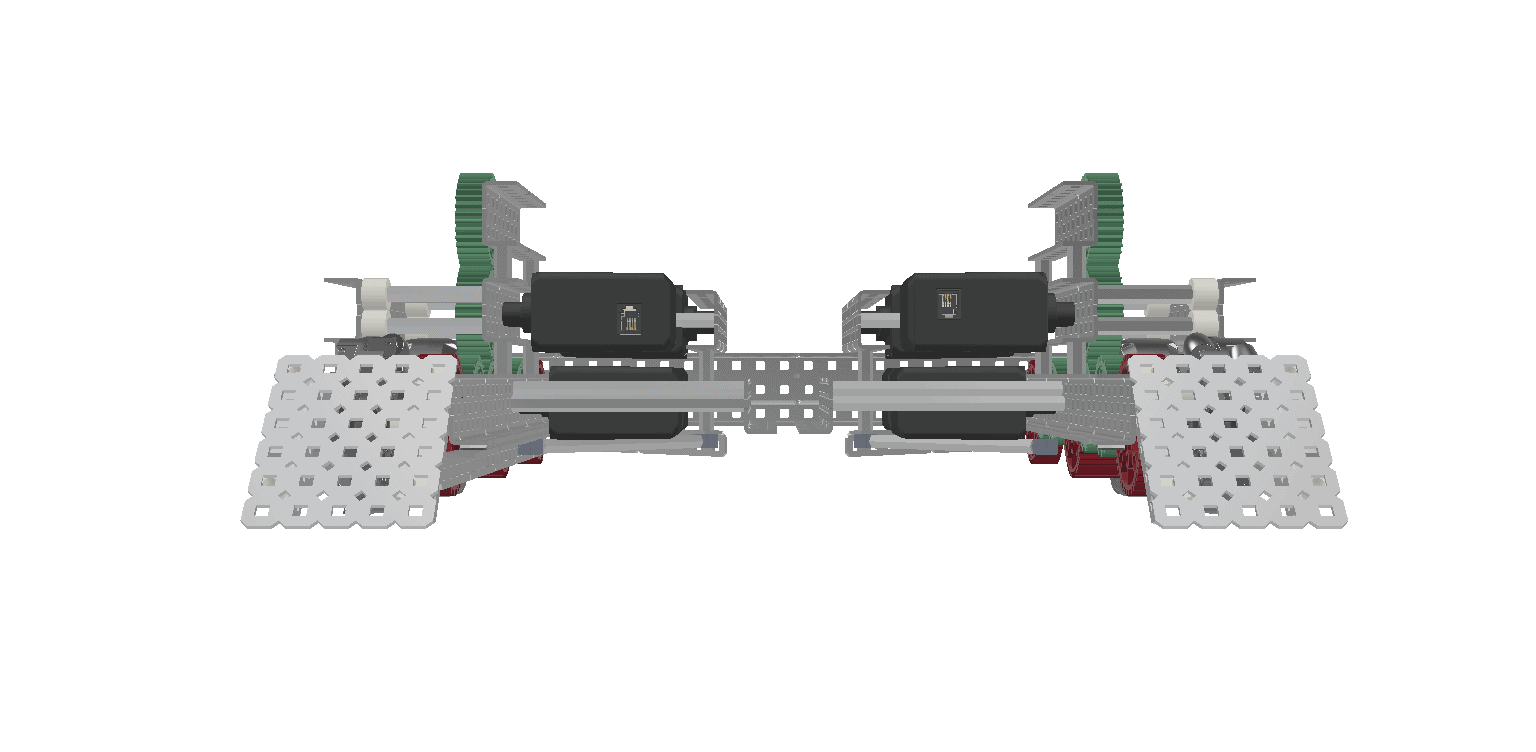
We also noticed when reviewing past competitions that when most of the foam disks are scored towards the end of a match, the second method of scoring becomes what most drivers tend to gravitate towards. During this portion of the match, strength is much more advantageous for a robot to excel at when compared to speed. To counteract the low torque chassis we designed, we implemented a wedge on one side of the robot. During any specific match, the wedge is the back of the robot for most of the match. Toward the end of the match, when the second method of scoring becomes most drivers’ primary focus, the wedge side of the robot becomes the front. We implemented this switching of drive direction to make the robot as easy to drive as possible when changing focus from the first scoring method to the second.
Overall, iROBO is feeling confident in the 15” x 15” x 15” chassis we have designed. We as a team are in agreement that the chassis is the foundation of the robot so without a well-designed chassis, we can’t have a well-designed robot. With the design of the wall, implementation of the wedge, and overall low moment of inertia we are looking forward to finishing the designs of the catapult, intake, indexer, roller, and paring break. The foundation we have created has us very excited for our first competition in early March of 2023. The 18” x 18” x 18” robot will be revealed later in the year to not give away all of iROBO’s trade secrets.




{kind=link}
{kind=link}
{kind=link}