This past season has been a season of a lot of learning for EVO Robotics. This JSDC season, the team worked on exploring more mechanical complexity. Starting from last semester, we were working on using a different control with a microcontroller called the Sasquatch. We were able to apply knowledge about Arduinos that most of us had dealt with to work. It turns out we discovered that later in the season that our controller was faulty and we would have to re-upload code every time we disconnected power from the controller. This was a major setback in terms of efficient testing. Though this was a pain, we were able to use this controller to do some pretty cool things with an updated drivetrain. The Sasquatch offered on-board solenoid drivers for robotic applications.

|
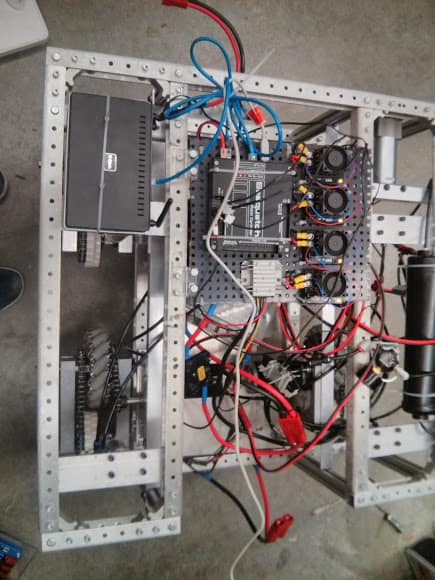
| Preliminary electronics board prototype |
Last in last year’s competition we learned that even though Mecanum Wheels offered a lot a maneuverability (we were literally driving circles around opponents), when we allowed it, we were pushed out of the way of other robots rather easily. This year we developed a jump-drive (also refereed to as Octocanum) system that incorporated a Mecanum Drivetrain, but we could drop down traction wheels when we needed to to push other robots who don’t play nice out of the way. When this happened, the robot appears to “jump” a little. This drop down of traction wheels required the use of a pneumatics system which we didn’t have last year. We had to learn about the nature of managing air pressure with regulators and sensors to control our on board compressor.
| Video of pneumatics in action |
This past season, we also have continued our tradition in aesthetics featuring a Pokemon and lights of our new team color, blue!

This jump-drive capability ended up being put to work in one of our round robin matches, clearly able to push an opposing robot out of the way. Unfortunately when the other robot decided to back up and ram us, we lost communications with our robot. These communication issues really caught up to us in our first elimination match. Our robot lost communications in the first minute of the match and was eliminated. Despite these setbacks this year, the team can probably use these lessons learned next year, and we’ll make our comeback!
Check out more photos from this year below.