Hi everyone! This is team Space Jam back for Fall 2020 and super excited to get things underway. We’ve already begun work on this year’s bot and are looking forward to making the most of this season.
For our first three seasons, team Space Jam built some type of spinner weapon (either horizontal or vertical). Our goal in those years was to impart as much energy as we could to do as much damage as we could to our opponents — and boy did we deliver. This year, team Space Jam is excited to pursue a more nuanced and precise approach: we want to build a flipper.
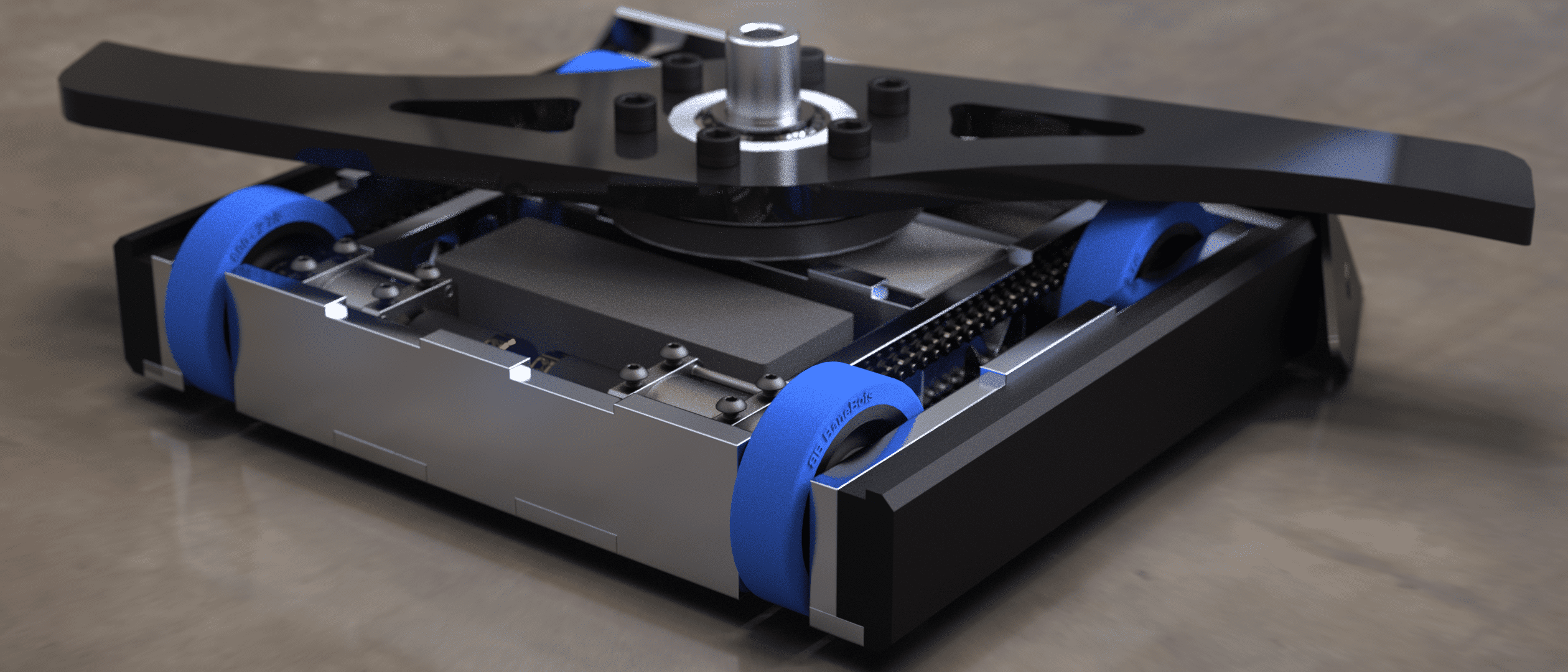
But wait, there’s a catch. You might be thinking “Oh cool, they’re going to work with pneumatics to make a flipper”. Wrong! Our awesome members are working on a mechanism to store rotational energy from a motor and release it all at once, tossing our opposition into the air! Below is a render of our current prototype — keep in mind, it’s still a work in progress:
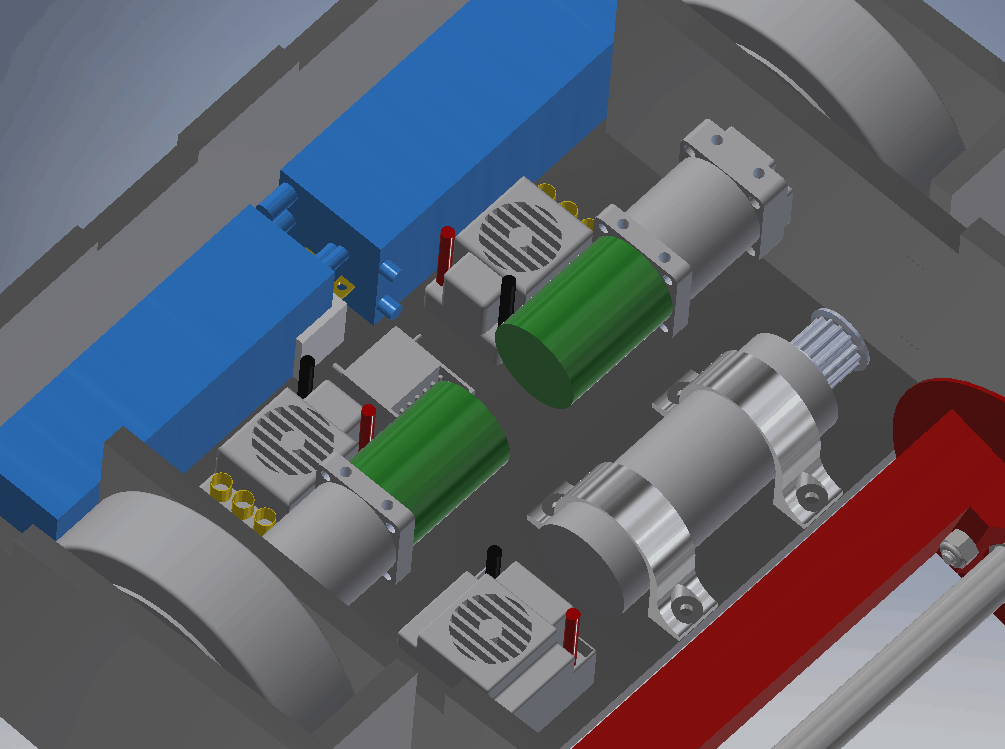
The central idea behind this mechanism is that the flywheel will be brought up to speed by a motor via a belt/pulley. Once at speed (and positioned under a robot), a linkage attached to the flipping arm will engage a dog clutch and make contact with the flywheel. As a result, all the energy in the spinning flywheel will be transferred into the flipping arm, and then into our opponent! The next steps for us are to develop the linkage and flipping arm to trigger when under a robot.
We’re super optimistic about this robot and ready to make an impact in our senior season!




{kind=link}
{kind=link}
{kind=link}