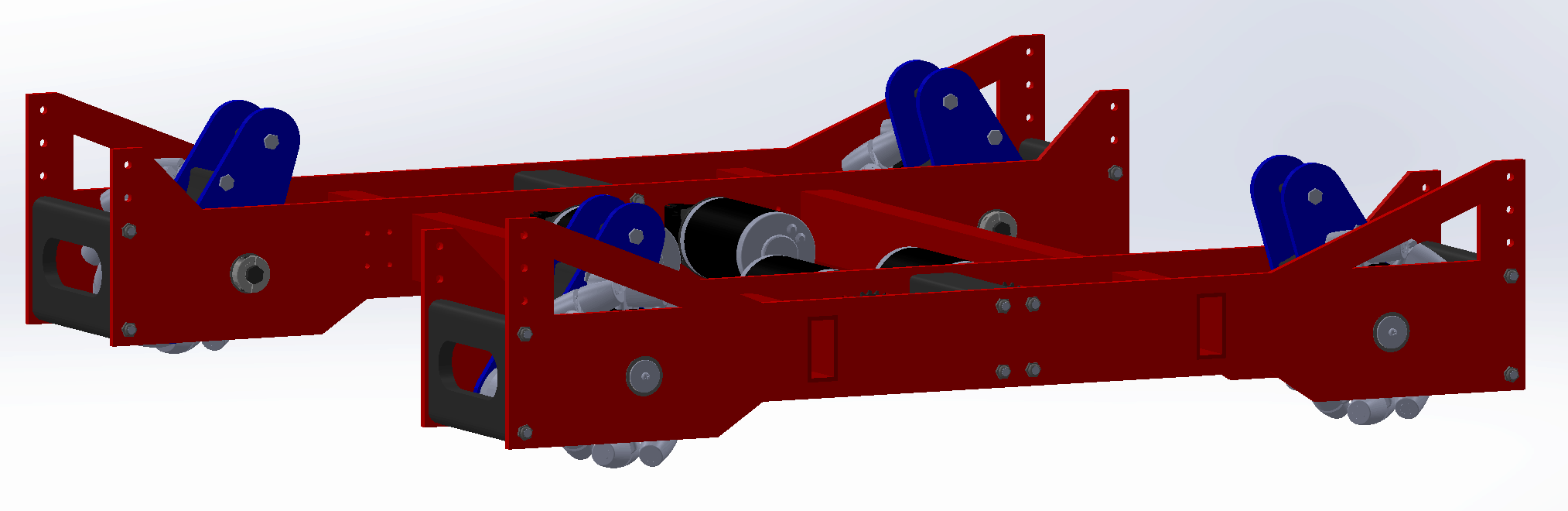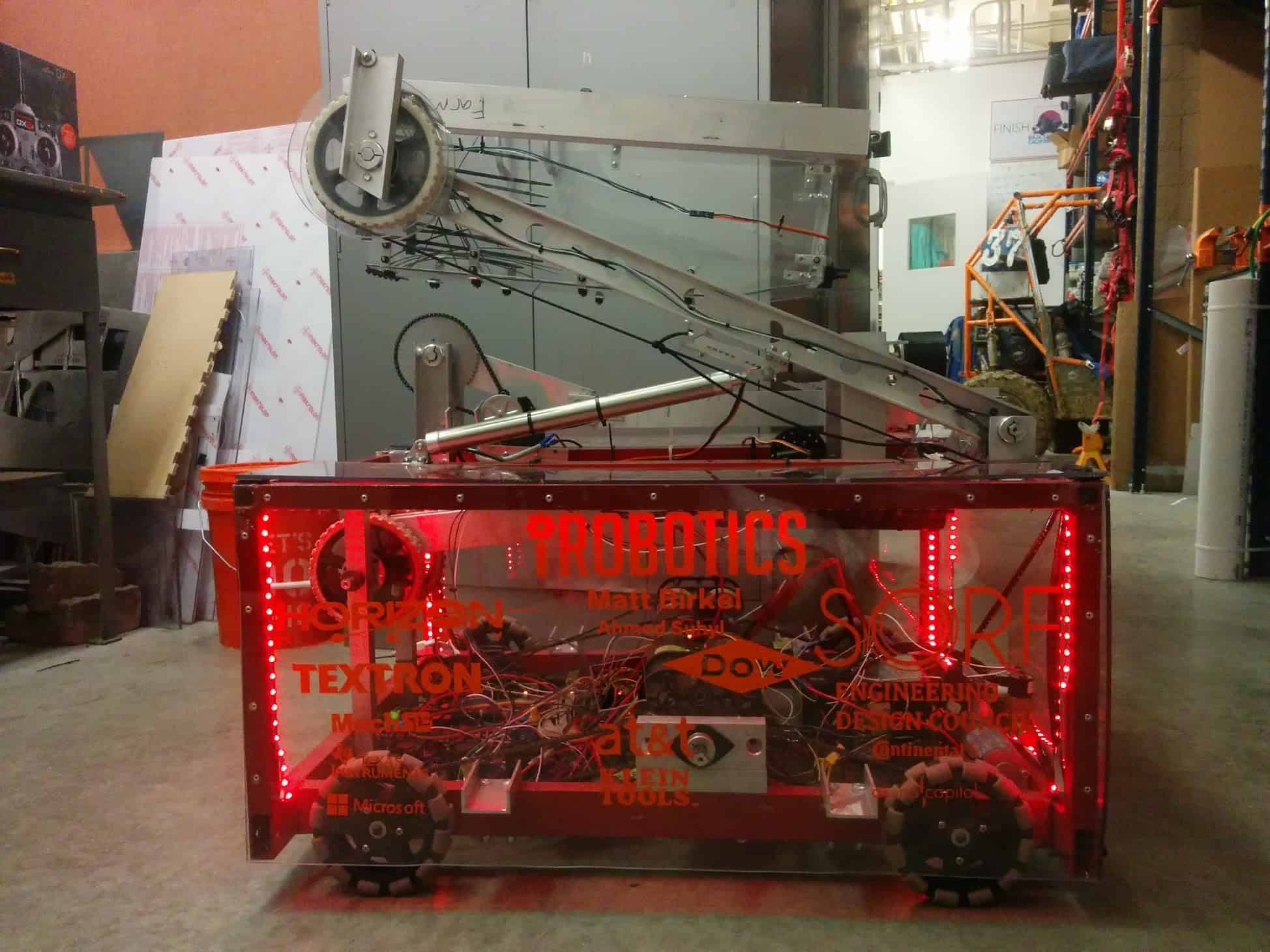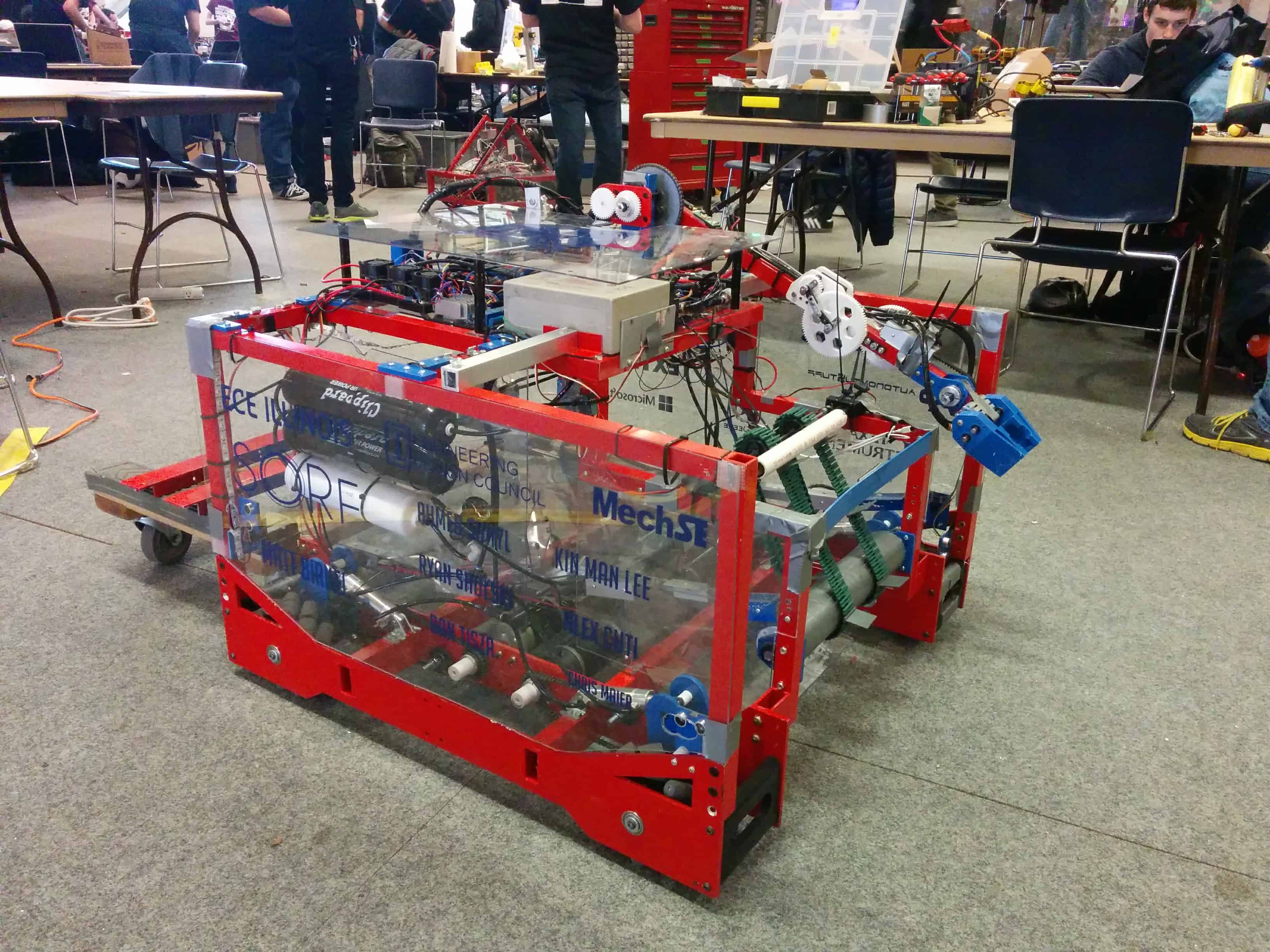
It’s time for the Transfarmers to wrap up a fun and successful year. This year we worked hard to be ahead of schedule and had our robot driving days before competition, with only minor additions being added the nights before EOH. Our robot design was very effective and we are proud to be one of the few teams able to consistently grab the ‘key’ for the 2017 MRDC game and line it up with the ‘lock’ in the arena. This year we switched to a new type of drivetrain which we have dubbed the ‘compact jump drive’ made using the waterjet cutter. We then constructed the rest of our frame on top the drivetrain using welded aluminum tube. Our robot design consisted of a ground intake to lift the soccer balls from the floor and push them through a one way door into our ball storage area. In addition to our ball intake, we designed and built a modular key manipulator which could quickly be lifted off of the robot and clamped to either the top left or top right of the robot. The modular design was chosen so that we could always have our key manipulator on the side of our robot necessary for us to line up directly under the soccer ball dispensers while inserting the ‘key’, thus allowing us to have the soccer balls drop straight into our ball storage area rather than picking them up from the floor. Unfortunately, due to differences between the actual field and the CAD model released with the game rules our robot was not able to perform up to its full potential during matches. Upon this realization we gave it our best effort to redesign and build a new ball intake the night of competition which worked flawlessly in our matches on the second day. All in all the Transfarmers had a great year and look forward to another two to come as we transition to juniors and continue to learn and improve.